Sunday Feb 22, 2026
Sunday Feb 22, 2026
Tuesday, 24 April 2018 00:00 - - {{hitsCtrl.values.hits}}
By Damith Chathuranga
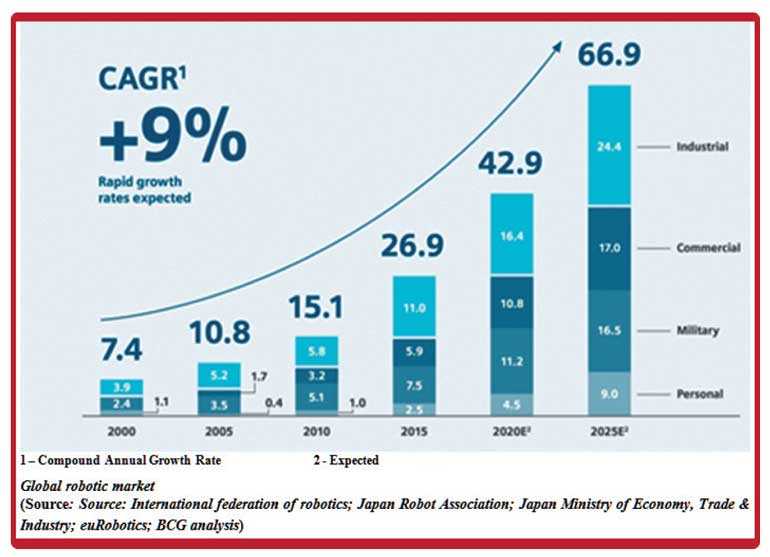
According to the 2017 report of IFR (International Federation of Robotics), by 2020 it estimates that more than 1.7 million new industrial robots will be installed in factories worldwide. Furthermore, it adds that sales of all types of domestic robots (e.g. vacuum cleaner robots, lawnmower robots, window cleaner robots) could reach almost 32 million units in the period 2018-2020, with an estimated value of about $11.7 billion. Simultaneously, total unit sales of service robots are estimated to reach a total of almost $18.8 billion. 
Adding to that, the global patient monitoring and assistance robots market is forecast to grow at a CAGR (Compound Annual Growth Rate) of 30.27% during the period 2017-2021. Additionally, a report from the BCG (Boston Consulting Group) estimates that more than $67 billion will be spent worldwide in the robotics sector by 2025. These projections indicate that a $30 billion market will be opened in the near future for savvy entrepreneurs willing to invest in the robotics sector.
However, automation and robotics technology is evolving. Unlike the traditional automation which require tedious programming of robot systems, the emerging technology is the gradual introduction of autonomous systems. This means, robots will use machine vision, motion sensors, image and voice recognition, and advanced new software to handle increasingly intelligent work. These include interacting with and continuously learning from their environment, and from people. These are the types of tasks where conventional robotics expose their lack of finesse.
Most conventional robot systems are built from stiff materials such as steel, aluminum and ABS (Acrylonitrile butadiene styrene) plastic. They are usually powered by electric motors or by pressurised hydraulic fluids pumping through tubes. Such machines are capable of large forces, high speeds and great precision, making them much effective in factory assembly lines where the environment is controlled, and human interactions are restricted. In addition to safety concerns, these robots are not very good at adapting to changing circumstances.
To add further, some of these robots are not well-matched to the materials they handle. An example would be packing of deformable and fragile food items such as eggs, sponge cakes, fruits and pastries. A conventional ridged gripper would not be able to grasp such easily deformable object without damaging the item. Developing such a rigid gripper with sensory feedback to precisely control gripping force would cost a small fortune. The cost associated with such complicated systems, setup and operating costs of rigid and heavy structures, limitations in degrees of freedom and dexterity are few important reasons why these robotic systems are not widely adapted in autonomous robot applications.
With the introduction of soft robots, new avenues were opened up to advance the autonomous robot technology. This technology allowed to build robots with soft structures, more degrees of freedom and dexterous. It also allowed to enhance existing traditional robots by adding compliant/soft components such as grippers, sensitive skin and variable stiffness joints.
What is a soft robot?
Soft robotics is a general term that covers all types of active and reactive compliant systems ranging from soft actuators, soft stretchable sensors, soft energy harvesting, and even soft electronics. However, soft robot is an engineered mobile machine that is largely constructed from soft materials (e.g. silicone) and most commonly powered by flow of fluids (e.g. air and liquid).
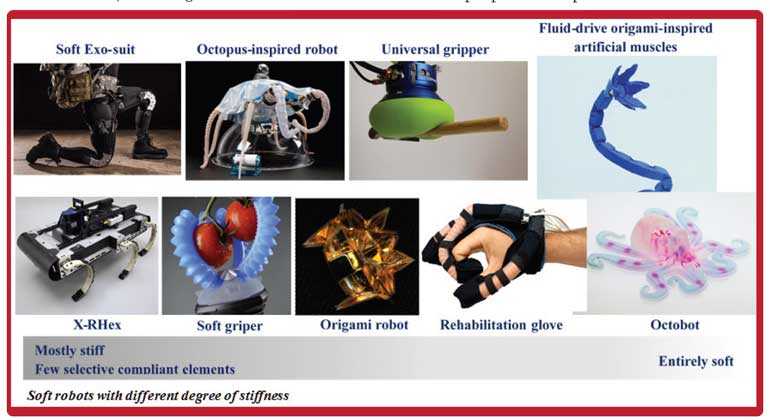
Soft robots deform during normal use and range from being simply flexible to being extremely ‘squishy’ and capable of dramatically changing their size and shape (morphing).This allows for unique kinds of movements which often mimic animal behaviour. These robots usually tend to have higher degrees of freedom and dexterity. This technology has spun out various applications ranging from industrial to medical in various degrees of stiffness.
Fabrications of soft robots
The components of a robot system are its structures, actuators, sensors, and control algorithms. Each of these parts except the control algorithm can be made from soft materials using the following techniques:
1. 3-D printing and rapid prototyping–The robot structures can be printed using 3D printing technology. The structural elements can be printed with varying stiffness for desired actuation patterns.
2. Casting – Soft material (silicon) is poured to a mould cavity and after curing, the moulds are removed, exposing the cast.
3. Injection moulding – Soft material is injected to moulds under pressure; and eject the material after solidification.
4. Coagulant dipping process – Soft robots can be made by dipping a pattern multiple times into a latex solution in order to achieve a required thickness.
5. Layered composites – Materials with different properties are sandwiched together to get desired shapes and actuations. Origami robots are made with this method.
Applications of soft robots
Industrial robotics
Lightweight, high payload soft robots are now available in the market. These robots can carry a payload same as or above its own weight. They have more degrees of freedom and dexterity than the traditional robot counterparts. Having softer structures make the robots safer for the humans to operate closer allowing the possibility to collaborate with work such as assembling complex components. Often, these systems mimic nature. An example would be the Bionic Motion Robot where its movements are inspired by elephant’s trunk and octopus’s tentacles.
Not only robots that look and behave like an elephant’s trunk, but also like that of traditional articulate type robots are also developed. These robots are fabricated entirely with soft materials and hold objects and perform tasks similar to that of conventional robots. However, due to their inherent flexibility, these robots do not have the precision or accuracy of rigid robot systems.
Soft robotic grippers are another example in industrial applications. These grippers allow for dexterous manipulation of everyday objects. Unlike rigid grippers, these can hold soft and different sized objects such as food items, fruits etc. These grippers can change their shape to cope with the varying shapes and sizes of the grasped object.
Collaborative robots
Many researchers and industries are looking at soft robotics as a new technology because of its most notable advantage: inherent safety provided by compliant body parts. Whenever there is a need for physical interaction between machine and human, soft robotic body parts serve as an additional safety layer in case the behaviour of human participants does not match predictions.
Soft robotics therefore has the potential to deliver completely new and safe human-machine interaction systems for workers, the elderly, and for entertainment industry. A typical example would be the product assembly environment where a human and a robot can work hand in hand to assemble a product.
Human motion augmentation
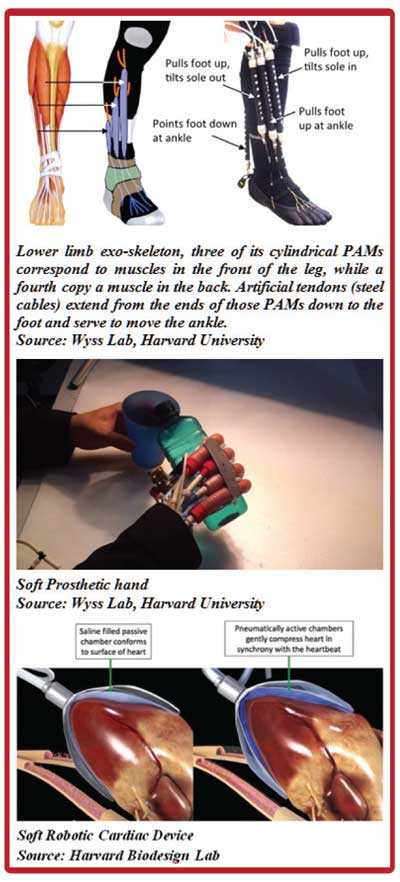
Recently there has been much interest in exoskeletons for use in rehabilitation and human motion augmentation. Till the most recent past, most exoskeletons were rigid, limiting their degrees of freedom to less than those of the body part they are moving. Currently engineers are researching "soft exoskeletons" that better replicate the body's own muscles, tendons and ligaments. Recent prototypes are designed to be worn on the limbs as a suit and the biological structure of the limb is imitated in the device.
Biomedical
Soft prosthetic devices are coming out to market as an alternative to rigid prosthetics. Rigid prosthetics usually have a limited range of motion and sometimes can be tiring to use. One important factor is that rigid prosthetics are quite expensive. Soft robotic prosthetics, on the other hand, could prove to be the cost-effective, aesthetic, lightweight, and strong solution.
Soft robotic actuators are an especially promising application in the field of orthotic devices. These actuators could interface with soft tissues within the body seamlessly. The use of these actuators in biomedical applications are fascinating. The initial demonstrations of using soft robotic technology toward cardiovascular applications has been related to aiding heart failure by use of cardiac pumps. Researchers from Harvard University and Boston Children’s Hospital have developed a prototype for a soft robotic sleeve for the heart that helps it beat. This customisable sleeve twists and compresses in sync with the heartbeat, improving cardiovascular functions weakened by heart failure.
Field robotics
Robots are frequently used for search and rescue missions, exploration, agriculture, military, etc. Due to the ability to mimic the animal biology, some soft robots can traverse difficult environments which wheeled or legged robots cannot. Amphibious robots are another type of robot that soft robotics technology can produce for underwater explorations. Mechanical engineers from Stanford University have developed a prototype for a vine-like soft robot that can grow long distances through ‘eversion’ (turning inside-out). A device like this could be used in search and rescue missions, transporting materials to hard-to-reach places and could even improve dexterity during medical procedures.
Massachusetts Institute of Technology (MIT) researchers reported a soft robotic fish that can bend continuously. It has no joints and is controlled by the flow of carbon dioxide pumped through channels in its tail. It achieved a range of motion that would be impossible for a hard robot. These types of robots could be used for tracking schools of fish in the sea, environment monitoring and espionage.
Stretchable electronics
A conductor can be built onto the surface of an elastomer. This structure will be able to bend and twist. These types of electronic circuits can be used in wearable technology such as health monitoring systems, medical implants and devices, vehicle on-board systems, electronic gadgets and much more. As a potential replacement to current circuit boards, these flexible conductors can be adhered to clothing for monitoring heart or brain activity, and even as drug delivery devices, etc.
Advantages of soft robots
1. These robots are inherently lightweight, which is perfect for human collaborative environments like assistive robots.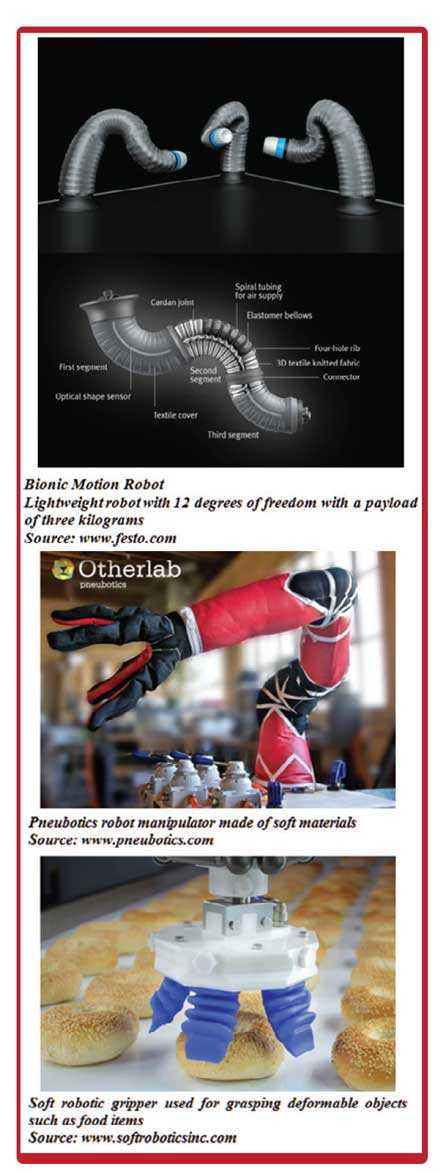
2. Often, soft robots are directly inspired by biology, such as the movement of the octopus. However, instead of simply copying the shape of an organism, soft robotics is also mimics the physical properties of the body, resulting in much more natural and fluid movements.
3. These robots are energy efficient. Similar to biological systems, compliant materials are able to deform due to forces (storing energy) and when the material returns back to the original shape, the stored energy is released (e.g., during locomotion). Furthermore, using smart materials such as dielectric elastomers, soft robotics provides a clever way of energy harvesting directly implementable in the body of the robot.
4. Soft robots can be made from biocompatible materials which is advantageous when we can use such materials inside our bodies for medical implants. Moreover, biodegradable materials can be used in the environment for solving problems. As an example, thousands and even millions of soft robots can be deployed in the environments to monitor, knowing that in time they will degrade to nothing and cause no damage.
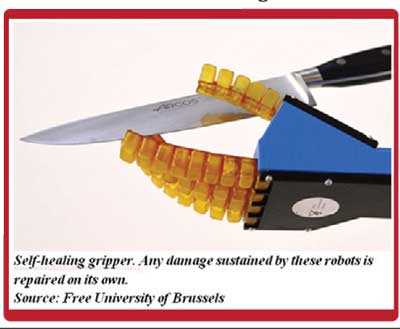
5. A soft robot deforms under pressure, which will be highly useful for surviving in uncertain environments. If a destructive load is applied (e.g. a sudden impact), the robot structure can spread the destructive load. In a dynamic, industrial environment with chemicals and heavy machinery, soft robots are more likely to be reliable compared to their rigid counterparts.
6. In contrast to rigid robotics, soft robotics must make a compromise between precision, compliance, and adaptability. Similar to biological organisms detect changes in their environment through their soft bodies and then change their stiffness and stimulate their muscles to achieve their goal, soft robots can do the same. Control and computation can be transferred to the body itself, completely bypassing control system. This concept is called as morphological computation. For example, octopuses use this decentralised computation in their tentacles to aid in autonomous behaviours such as reaching and grasping. This morphological computation in soft robotics helps to self-adapt their structures – e.g. smart grippers, adaptive energy efficient locomotion, and self-tuning pumps and fluidic propulsion mechanisms.
Limitations of soft robotics
1. Gravitational loading on a soft robot manipulator causes downward deflection: Gravity effects play a major role in these robot systems. When the soft robot is not energized (e.g. pneumatic), the structures tend to fold on top of itself due to self-weight.
2. Finding appropriate actuators, power sources and control schemes for soft robots is challenging: Traditional electric motors cannot be miniaturized and distributed similar to that of sensors. Small motors are very weak and inefficient. Hydraulic and pneumatic systems have been frequently used in soft robots, but these systems employ stiff components and pumps that are kept separate from the soft structure itself (usually completely off-board). Soft actuators such as electro-active polymers (EAPs), macro porous gels, and other phase-transition materials are expected to become more available, but all have serious limitations as robot motors.
3. Developing a control system that is suitable for highly deformable structures: Most of the existing methods cannot control high degree of freedom movements, particularly in unpredictable environments. This is an area of research that demands new approaches and it is likely to benefit from the concept of morphological computation (embodiment) developed in the field of artificial intelligence. Mimicry of animal behaviour is one option to solve this control problem.
[The writer, BSc. Eng. Hons (Moratuwa), MSc(Ritsumeikan), PhD (Ritsumeikan), is Senior Lecturer in Mechanical Engineering at the Department of Mechanical Engineering, University of Moratuwa.]


